



_Web_01_01.jpg?width=1240&name=Beewatec-3-(37)_Web_01_01.jpg)



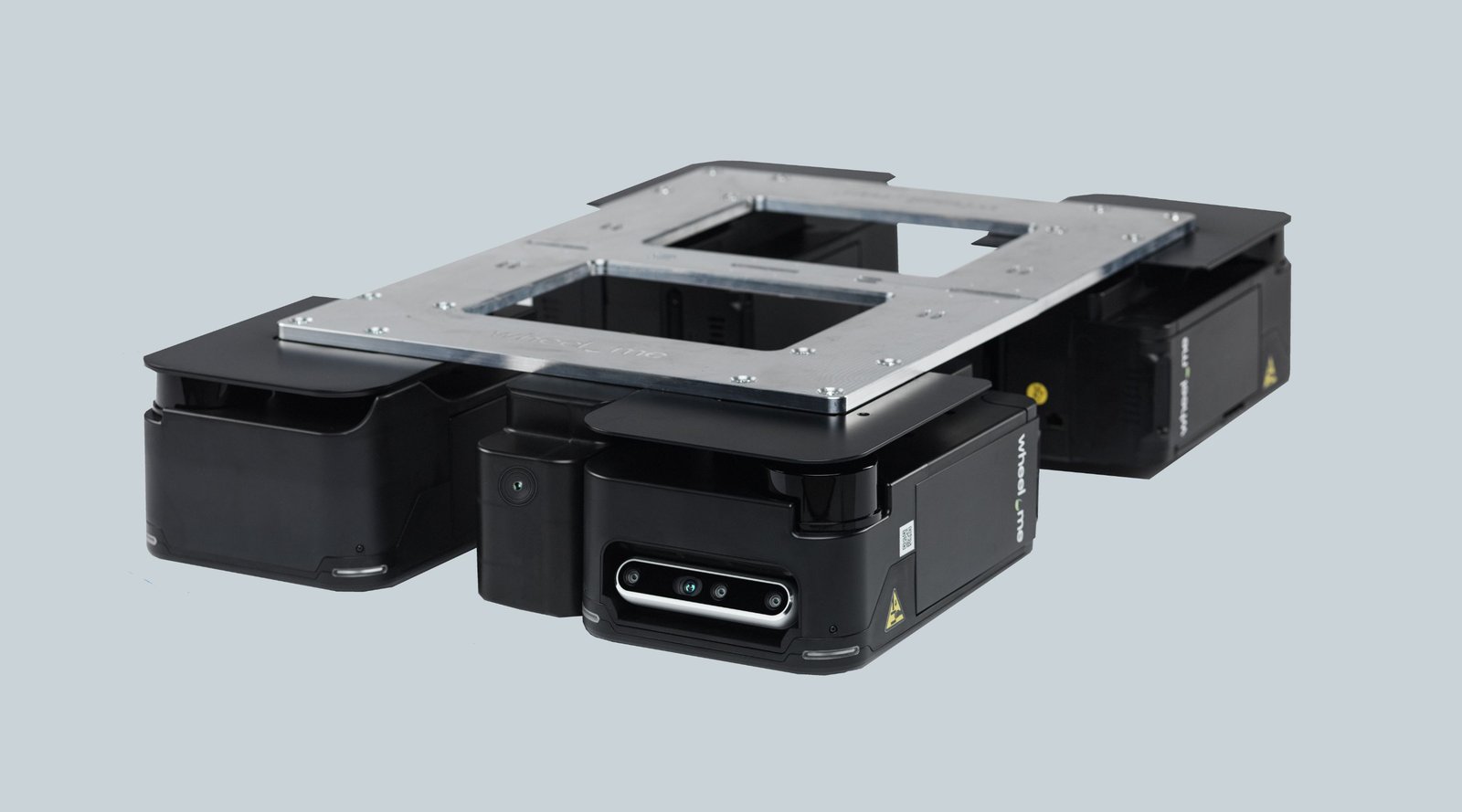
250 kg
Traglast bei 4 Rädern

Das Modul Genius 2 von wheel.me versetzt Regale, Trolleys, Paletten und mehr in vollwertige autonome mobile Roboter (AMR).
Sicherheits-Zertifizierung (Level D)
Dynamische Hinderniserkennung
Unbegrenzte Flexibilität
Individuelle Anwendungsfälle, wie das Transportieren von Regalen, Paletten, Gitterboxen & mehr, lassen sich einfach und schnell implementieren.

Ein Vergleich von autonomen Rädern, AMR und AGVs. In diesem E-Book beantworten wir folgende Fragen:

Automatisierter Transport von bestehenden oder neuen Regalsystemen

Automatisierter Transport von Paletten mit Vierkant-Grundrahmen

Automatisierte Bereitstellung von Material in der Produktion & Logistik für einen nahtlosen Materialfluss



| 4 Räder (Genius 2) | Andere AMR | Manueller Transport | |
|---|---|---|---|
|
|
|
|
|
| Preise (netto) | |||
| Einmalige Kosten | |||
| Laufende Kosten (pro Jahr) | |||
| Premiumservice (pro Jahr, optional) | |||
| Eigenschaften | |||
| Einfache Implementierung | |||
| Einfache Wartung | |||
| Flexibilität | |||
| Tragfähigkeit | |||
| Dynamische Hinderniserkennung | |||
| Spurlose, autonome Navigation | |||
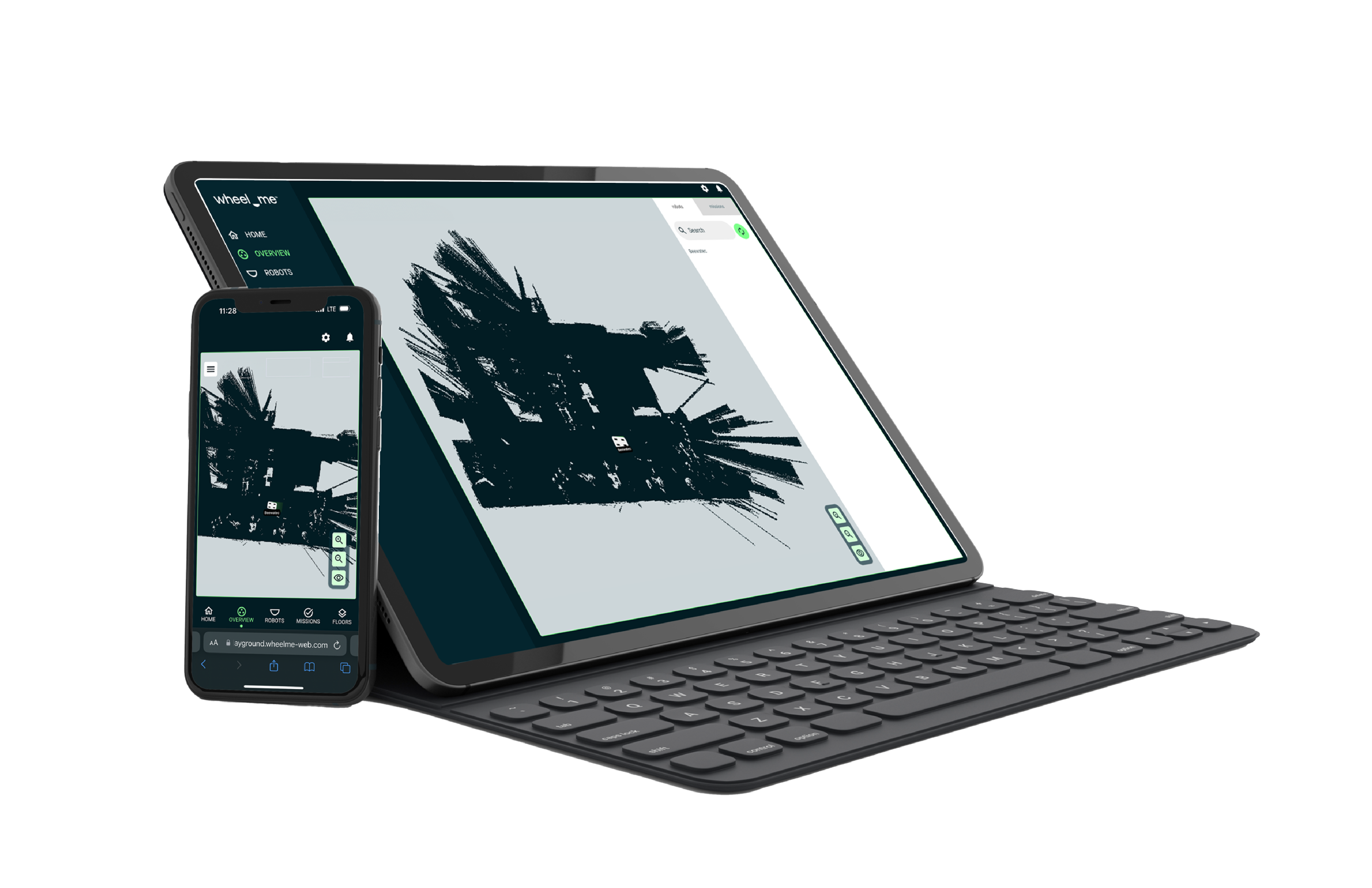
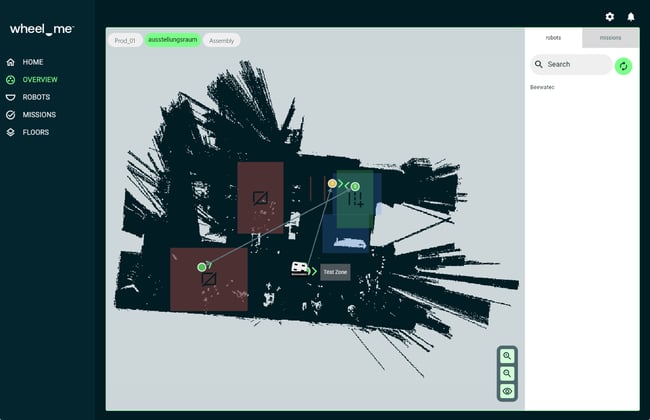
Mit der wheel.me App verwalten Sie die Aufgaben, die Ihre Genius-2-Systeme für Sie erledigen - übersichtlich und simple.
Intuitive Benutzeroberfläche
Automatisches Mapping
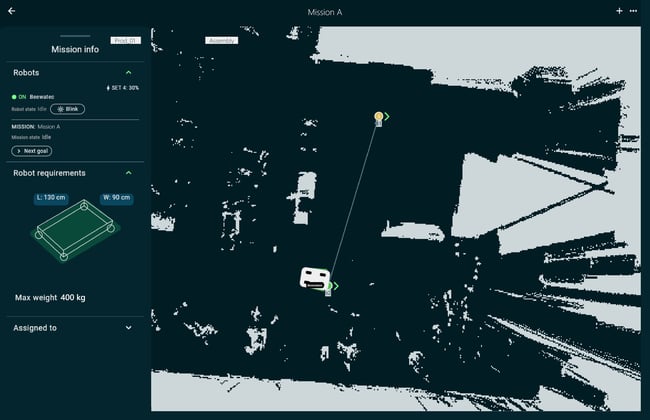
Echtzeit-Management
Damit behalten Sie zu jedem Zeitpunkt die Kontrolle über Ihre Roboter-Flotte sowie über Ihren Materialfluss in Produktion und Logistik.
Die Ansteuerung kann hierbei von jedem beliebigen Device und Ort aus erfolgen (Web-App in der Cloud).

