


_Web_01_01.jpg?width=1240&name=Beewatec-3-(37)_Web_01_01.jpg)

100%
استقرار المعالجة والتخطيط من خلال النقل الآلي للمواد - في الوقت المناسب.

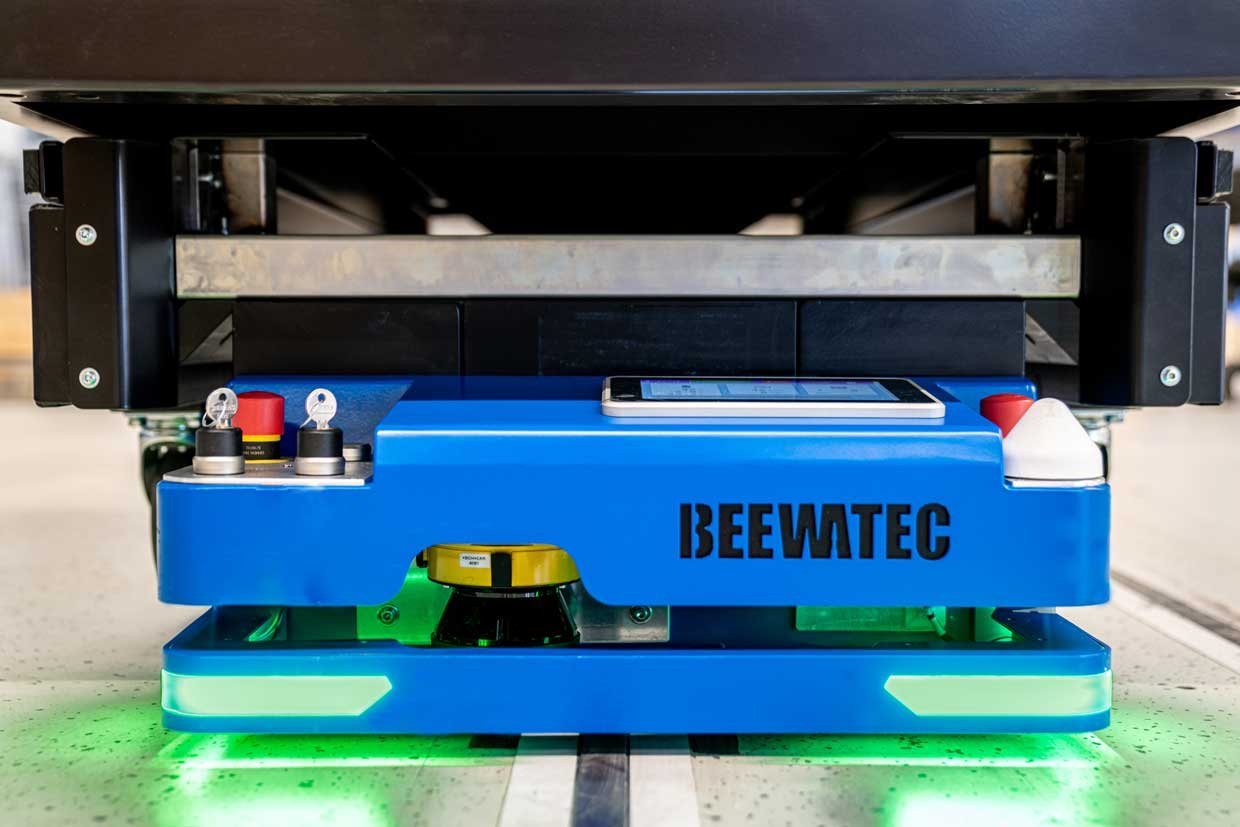
يمكن أن تصبح الماكينة BARY PXS-500 قريبًا زميلك الجديد في مجال الخدمات اللوجستية الداخلية. فهي تعمل تحت أنظمة الأرفف أو عربات مناولة المواد، وترفعها وتنقلها من أ إلى ب. وبذلك تضمن لك آلية تدفق البضائع وتقلل من مسافات السير والتكاليف في الإنتاج والخدمات اللوجستية.



مع BARY PXS-500، يبدأ كل شيء بطلب المواد. يمكن تشغيل ذلك إما يدويًا (على سبيل المثال عن طريق الضغط على زر ضغط) أو تلقائيًا (على سبيل المثال عن طريق تشغيل مستشعر بصري).

يتم إرسال هذه المعلومات إما سلكيًا (عبر شبكة LAN) أو لاسلكيًا (عبر شبكة Wifi / WLAN) إلى نظام إدارة الطلبات (OMS)، الذي يقوم بشكل مستقل بإنشاء مهمة نقل ("إحضار X من A إلى B") بناءً على مدخلات الإشارة.

يتم بعد ذلك نقل مهمة النقل الخاصة بنظام إدارة الأسطول إلى نظام إدارة الأسطول. هذا يدير مهام النقل ويحدد أولوياتها بشكل مستقل (يمكن التدخل اليدوي)، ويخطط مسارات الروبوت ويرسل مهمة النقل عبر شبكة WLAN إلى الروبوت المتنقل المستقل (AMR) في الميدان.
إذا لزم الأمر، يمكن توصيل الأنظمة الداخلية مثل أنظمة WMS/ERP ببرنامج إدارة الأسطول عبر واجهة/برامج وسيطة موحدة أو فردية.

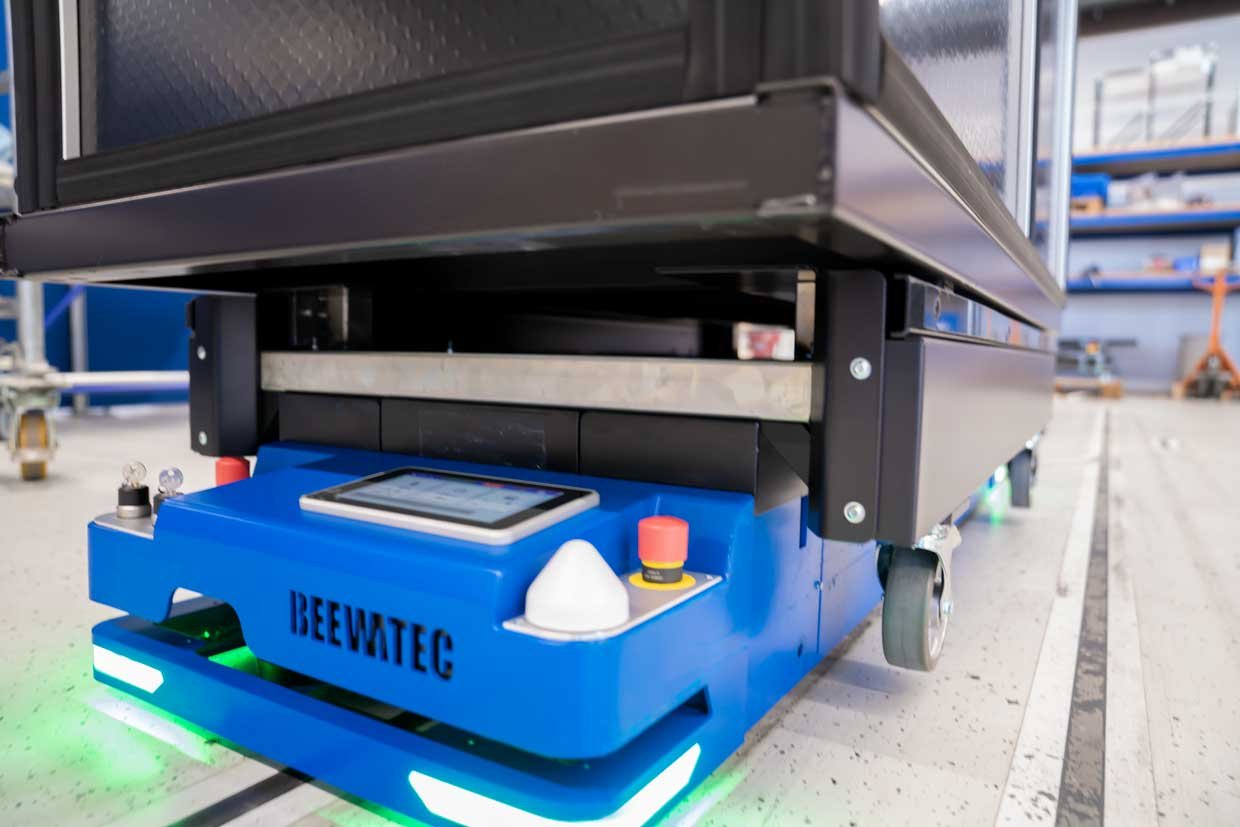
يتلقى نظام BARY PXS-500 مهمة النقل من نظام إدارة الأسطول، ويلتقط عربة مناولة المواد على سبيل المثال في الموقع المحدد، وينقلها من A إلى B، ويضع العربة ثم يبلغ نظام إدارة الأسطول عن إتمام المهمة بنجاح.
يتحرك كل روبوت AMR من BeeWaTec بحرية واستقلالية في بيئته بمساعدة خوارزميات متطورة.
عند القيام بذلك، يقوم الروبوت AMR بحساب المسار الأقل مقاومة في الوقت الفعلي بناءً على البيانات البيئية، اعتمادًا على المسافات أو العوائق أو الأشخاص أو المناطق المحظورة (مثل الأرفف أو مناطق العمل). وهذا يضمن أقصى قدر من الكفاءة في تخصيص البضائع الخاصة بك في جميع الأوقات.
يُستخدم الماسح الضوئي الليزري المدمج للسلامة بالتوازي كجهاز لحماية الأشخاص وكذلك للملاحة الذكية ويوفر أمانًا إضافيًا لموظفيك.

تتحرك أجهزة AMR الخاصة بنا بحرية في بيئتها بدقة تحديد المواقع +/- 10 مم. وللحصول على دقة أعلى في تحديد المواقع تصل إلى +/- 5 مم، يمكن استخدام أوضاع ملاحة إضافية إذا لزم الأمر، والتي يمكن لجهاز التحكم في الحركة الآلية أن ينتقل بينها تلقائيًا أثناء التشغيل (على سبيل المثال أمام محطة نقل مباشرة).
تقدم BeeWaTec ما مجموعه أربعة أنواع مختلفة من الملاحة، والتي لها مزايا وعيوب مختلفة اعتمادًا على بيئة التشغيل ومتطلبات النظام والجوانب الأخرى.
يمكن الاطلاع على مقارنة مباشرة بين أنواع الملاحة هنا:
| ملاحة حرة (ليزر) | مسار التوجيه البصري | شريط مغناطيسي | النقاط المغناطيسية | |
|---|---|---|---|---|
|
|
|
|
|
|
| الوصف | يتم تنفيذ عملية الملاحة بمساعدة بيانات البيئة التي يوفرها الماسح الضوئي الليزري الآمن، والتي يتم تقييمها بواسطة جهاز التحكم الآلي في الحركة وتحويلها إلى أوامر قيادة وتوجيه. |
يعتمد توجيه المسار على شريط مسار بصري ملتصق بالأرضية. يخلق شريط المسار تبايناً يتم تقييمه بواسطة نظام كاميرا داخل الروبوت. |
يتم توجيه المسار بواسطة شريط مغناطيسي ملتصق بالأرضية. يولد الشريط المغناطيسي مجالاً مغناطيسيًا يتم مسحه بواسطة مستشعر توجيه المسار الملصق بالروبوت. |
يتم التتبع بواسطة مغناطيسات مدمجة في الأرضية. يولد كل مغناطيس مجالاً مغناطيسياً يتم اكتشافه بواسطة مستشعر مغناطيسي على الروبوت عند مروره فوقها. |
| متوافق مع BARY CM-100 | ||||
| متوافق مع BARY PXS-500 | ||||
| دقة تحديد المواقع | +/- 10 مم |
+/- 5 مم |
+/- 5 مم |
+/- 5 مم |
| تغييرات المقرر الدراسي | ||||
| حركة مرور الرافعة الشوكية | ||||
| أرض قذرة | ||||
| الاستخدام الخارجي | ||||
| تكاليف الاستثمار | منخفضة للغاية |
منخفضة |
منخفضة |
أعلى |
يقوم الروبوت BARY PXS-500 بالمناورة أسفل الهياكل (مثل الأرفف) ويرفعها عبر وحدة رفع مدمجة. بعد عملية النقل، يقوم الروبوت المتحرك المستقل بوضع الهيكل المعني في موقع محدد ويقوم بمهمة النقل التالية.
نحن لا نتركك بمفردك مع الروبوت الخاص بنا، ولكننا نقدم لك الحل المناسب مع نظام توصيل الأنابيب الخاص بنا، حيث يمكن تحقيق أي نوع من نقاط النقل.
يتم شحن أجهزة BARY (AMRs) الخاصة بنا بدون تلامس من خلال حل BEECharge الخاص بنا لضمان مزيد من الأمان في عملية الشحن، وتقليل وقت التعطل والشحن أثناء العملية (= الشحن الذاتي). كما أن التخلص من التلامس الميكانيكي أثناء عملية الشحن يضمن أيضًا عدم حدوث أي تآكل أو تلف.
التشغيل والتركيب سريع وسهل (= التوصيل والتشغيل). إذا تغير تصميم التشغيل الخاص بك في أي وقت، يمكن ببساطة تشغيل BEECharge في مكان آخر.

تتلقى منا جميع المكونات، أي الأجهزة والبرمجيات وكذلك الواجهات التي تحتاجها لأتمتة عملياتك التي تتضمن نقل البضائع: